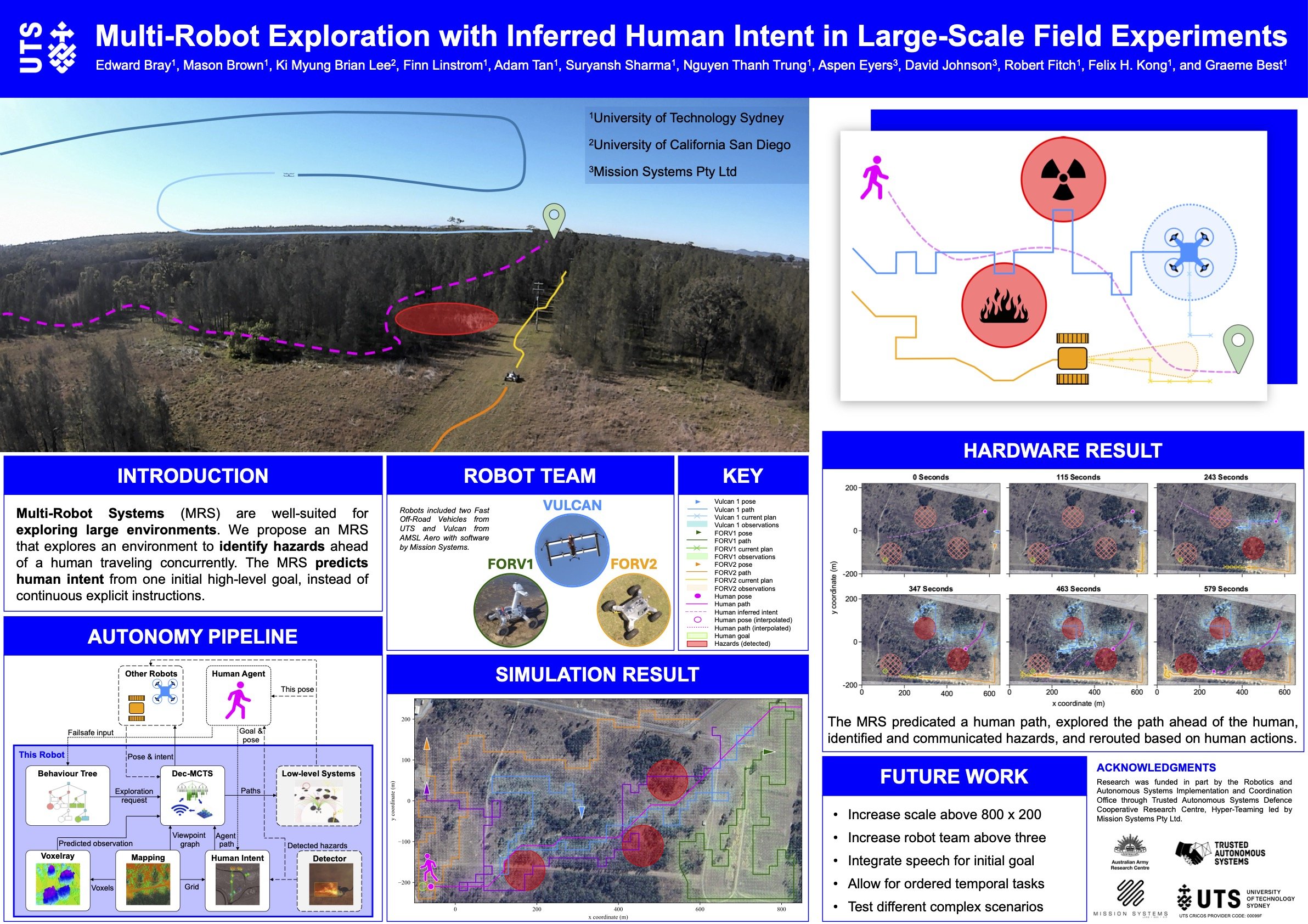
Multi-Robot Exploration with Inferred Human Intent in Large-Scale Field Experiments
Late-Breaking Results Poster Session, Australasian Conference on Robotics & Automation (ACRA), 2024
We present a multi-robot system (MRS) designed to support humans in hazardous environments through predictive exploration. Using Human Intent Inference (HII) and Decentralised Monte Carlo Tree Search (Dec-MCTS), our MRS prioritises areas relevant to humans. Late-breaking simulation and hardware results support our 2024 IROS article.
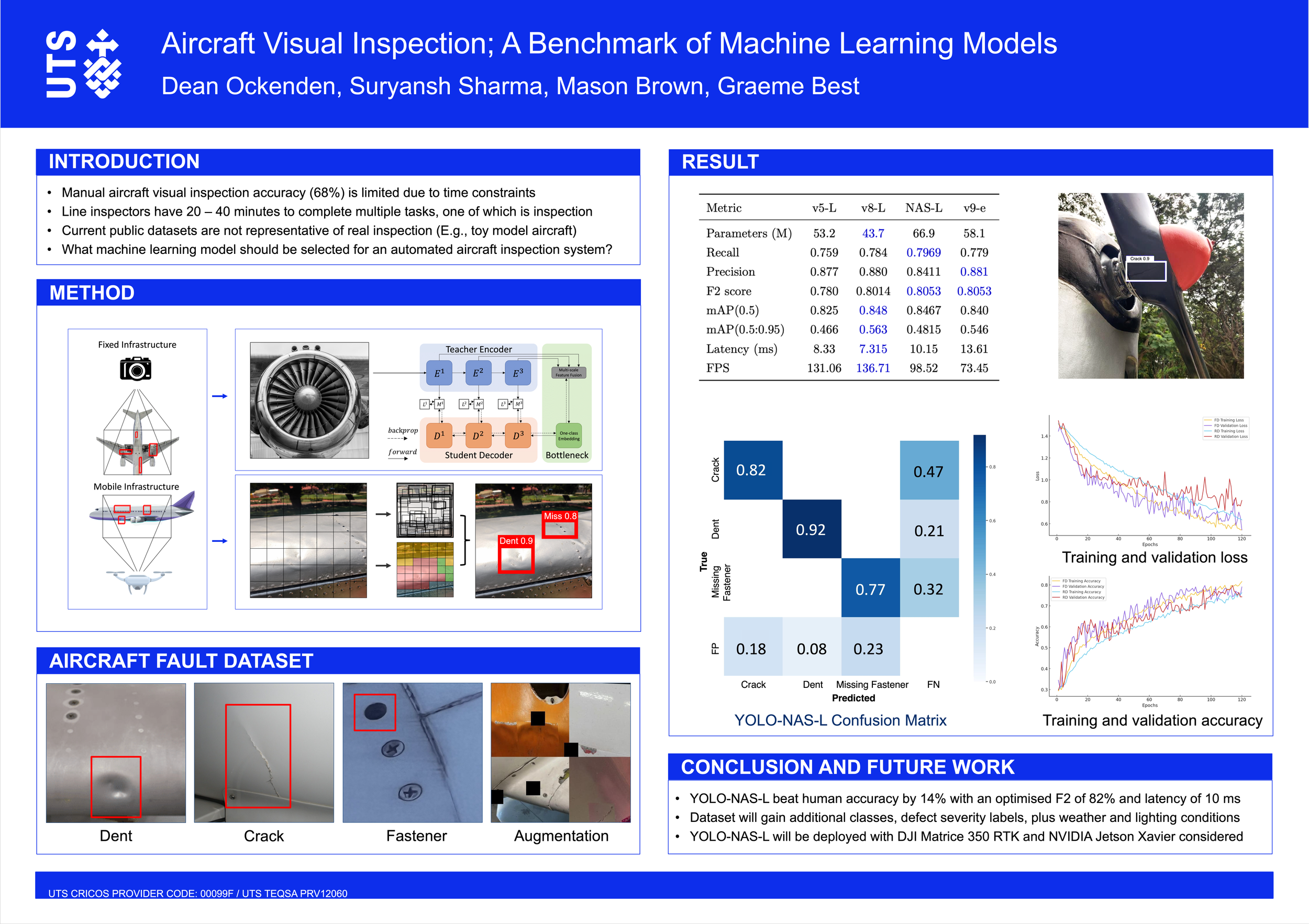
Aircraft Visual Inspection; A Benchmark of Machine Learning Models
Poster Session 1, Australasian Conference on Robotics & Automation (ACRA), 2024
Aircraft inspection benchmarks supervised and unsupervised models for fault detection. A custom aircraft defect dataset was developed. YOLO-NAS-L achieved an F2 score of 0.82, improving human accuracy by 14%. Unsupervised models reached ~80% accuracy on a public defect dataset.
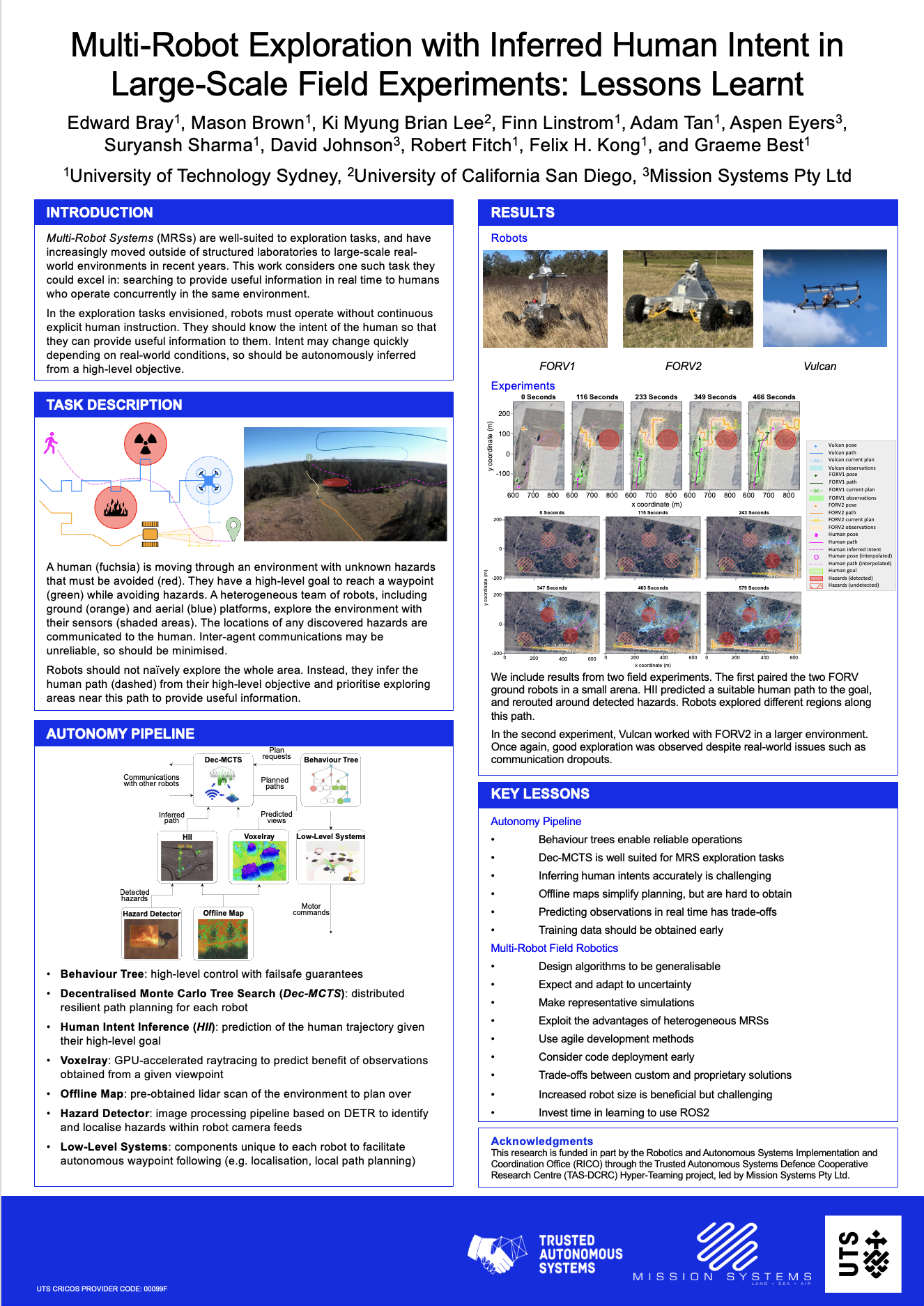
Multi-Robot Exploration with Inferred Human Intent in Large-Scale Field Experiments: Lessons Learnt
Workshop on Real-World Challenges in Multi-Robot Cooperation, International Conference on Intelligent Robots and Systems (IROS), 2024
We provide lessons learned from developing a multi-robot system (MRS) for informative path planning in a large-scale field environment. Our heterogeneous MRS explores a hazardous area to ensure human safety. The primary lessons learned concern algorithm design for outdoor MRSs and the challenges posed by developmental robotic platforms. The conference invited our team to present due to winning the best paper award for this workshop.
Instructing Robots with Language via Bi-RNNs for Logic Translation
ACRA, 2023
We consider the problem of planning trajectories that satisfy natural language instruction, explore translating commands to logic formulae, and propose a Bi-RNN architecture for robot translation. The architecture achieves 1.6% better accuracy, 20% faster inference time, and 98% faster training time than leading models.
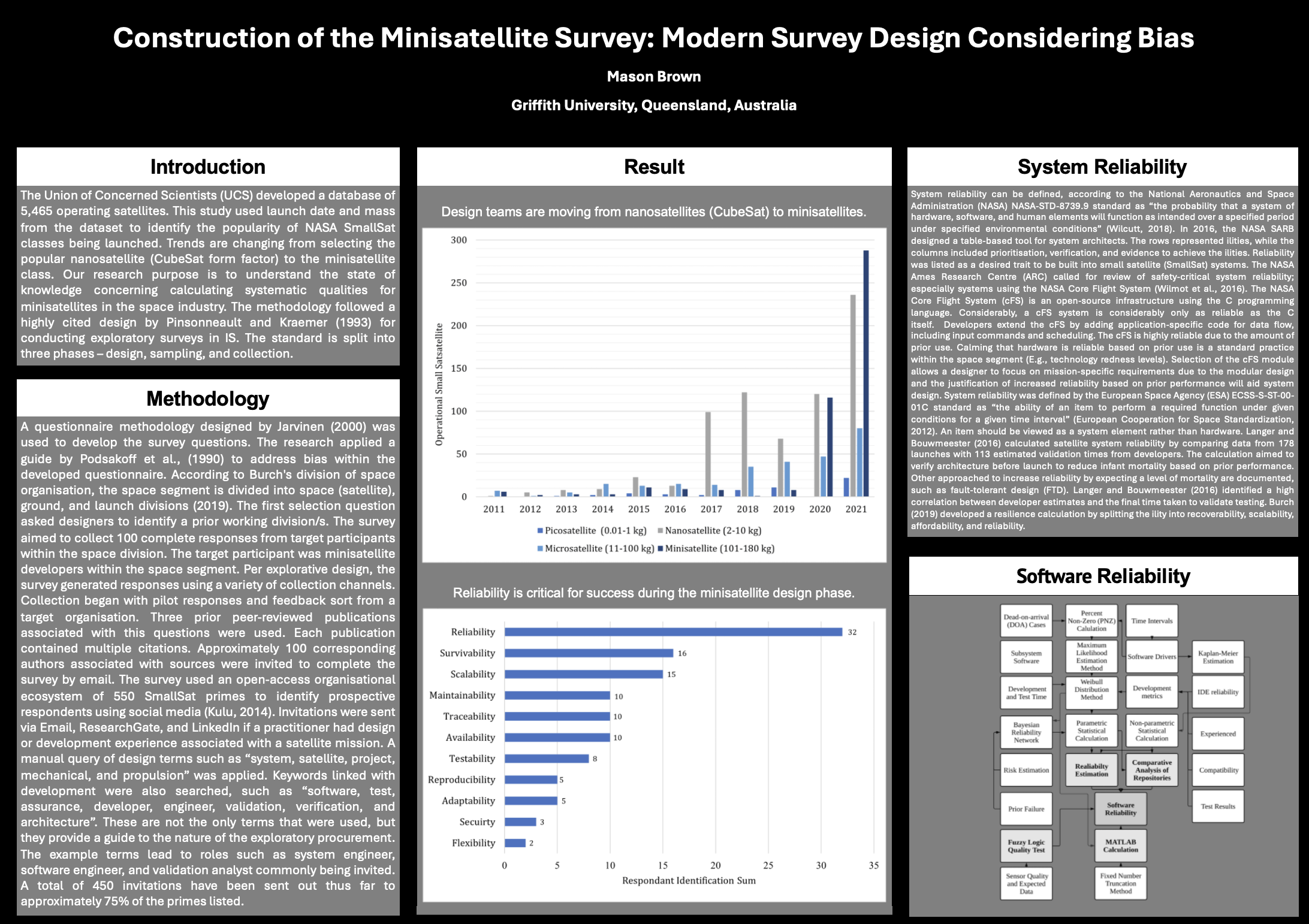
Construction of the Minisatellite Survey: Modern Survey Design Considering Bias
American Geophysical Union, 2023
Organisations select quality attributes “ilities” based on desired system performance. Agency standards define ilities. Primes within the space segment use agency standards (E.g., NASA-STD-8739.9) and open-source systems (E.g., NASA cFS) to aid design. This poster presents a survey design and initial findings from a pilot collection of 100 respondents to identify how desired ilities are calculated. This poster provides methods to improve survey response rate considering bias.
An Ility Calculation for Satellite Software Validation
IEEE Aerospace, 2022
A quality attribute “ility” taxonomy tackling the complexities of satellite engineering. The research resulted in a collection of 345 ilities defined using agency and prime standards. Quality inputs for reliability, scalability, and adaptability are visualised.
Dynamic Verification of Satellite Systems using Ilities
Journal of Space Safety Engineering, 2021
Bayesian estimation was applied to a NASA database of 219 smallsats (0.001–180 kg) failures from 2000 to 2016 to generate failure (reliability and survivability) categories. A communication system (47%) or attitude control (16%) failure is most likely to occur during a future NASA smallsat mission.

Selection Factors Determining the Hybrid Approach
Americas Conference on Information Systems, 2020
The choice of methodology for information system development (ISD) is a significant question faced by information systems (IS) professionals. The study investigates factors that influence selection of a hybrid approach to ISD.
Bray, E., Brown, M., Lee, K. M. B., Linstrom, F., Tan, A., Eyers, A., Sharma, S., Johnson, D., Fitch, R., Kong, F. H., & Best, G. (2024). Multi-Robot Exploration with Inferred Human Intent in Large-Scale Field Experiments: Lessons Learnt. Workshop on Real-World Challenges in Multi-Robot Cooperation, IROS. Available: https://www.researchgate.net/publication/384893740_Multi-Robot_Exploration_with_Inferred_Human_Intent_in_Large-Scale_Field_Experiments_Lessons_Learnt
Sharma, S., Lee, K. M. B., Brown, M., & Best, G. (2023). Instructing Robots with Natural Language via Bi-RNNs for Temporal Logic Translation. In Australasian Conference on Robotics and Automation. Available: https://www.researchgate.net/profile/Mason_Brown2/publication/376266308_Instructing_Robots_with_Natural_Language_via_Bi-RNNs_for_Temporal_Logic_Translation/links/65710e0fd21eb37cd4fa2b4e/Instructing-Robots-with-Natural-Language-via-Bi-RNNs-for-Temporal-Logic-Translation.pdf
Brown, M., Dey, S., & Tuxworth, G. (2023). Construction of the Minisatellite Survey: Modern Survey Design Considering Bias. In American Geophysical Union (AGU). iPoster. San Francisco, California, United States. Available: https://agu.confex.com/agu/fm23/meetingapp.cgi/Paper/1240609
Brown, M., Dey, S., Gervase, T., Burnus, P. and de Souza, P. (2022). Dynamic Verification of Satellite Systems using Ilities. Journal of Space Safety Engineering, 9 (1). Available: https://doi.org/10.1016/j.jsse.2022.02.009
Brown, M., Dey, S., Gervase, T., Co, J., Burnus, P. and de Souza, P. (2022, March). An Ility Calculation for Satellite Software Validation. In IEEE Aerospace Conference, the United States, pp. 1-20. IEEE. Available: https://ieeexplore.ieee.org/document/9843603
Brown, M., Dey, S., Gervase, T., Burnus, P. and de Souza, P. “Dynamic Verification of Satellite Systems using Ilities,” in the 11th International Association for the Advancement of Space Safety Conference, Netherlands, 2021, October, pp. 1-8. Available: http://iaassconference2021.space-safety.org/
Brown, Mason C.; Dey, Sharmistha; and Tuxworth, Gervase, "SELECTION FACTORS DETERMINING THE HYBRID APPROACH: A PRELIMINARY STUDY" (2020). AMCIS 2020 Proceedings. 3.
Available: https://aisel.aisnet.org/amcis2020/systems_analysis_design/systems_analysis_design/3/